Unit 1: Kinematics
Terminology
Position- Location at a specific time
Distance- How far an object has traveled regardless of its direction
Displacement- The overall change in position including direction.
Position- Location at a specific time
Distance- How far an object has traveled regardless of its direction
Displacement- The overall change in position including direction.
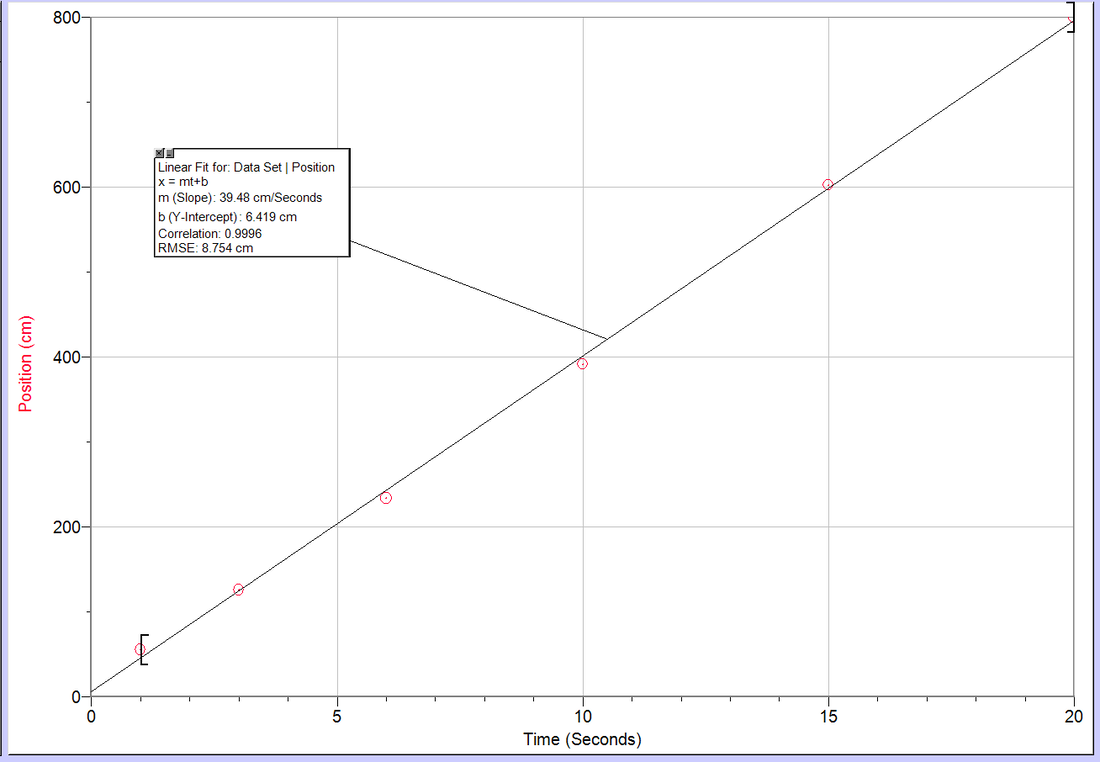
In a position time graph, the position of the object according to the origin is expressed as the y axis. The time is placed on the x axis. Above, the graph depicts the plotting of the points of position in relation to time. The higher the y value is, the farther away the object is from the origin. The farther the x value, the more time has elapsed. The y intercept of the graph is how far away the object is from the origin when the
Determining the Velocity and Speed from a Position Time Graph
The Speed of a Position Time graph is determined by finding the slope of the line of best fit. The slope is the speed of the object. The steeper the slope, the faster the object is moving. The Velocity is determined by combining speed with direction. Direction is expressed by the sign in front of the slope with a negative or positive sign.
Determining the Velocity and Speed from a Position Time Graph
The Speed of a Position Time graph is determined by finding the slope of the line of best fit. The slope is the speed of the object. The steeper the slope, the faster the object is moving. The Velocity is determined by combining speed with direction. Direction is expressed by the sign in front of the slope with a negative or positive sign.
Interpreting Velocity Time Graphs
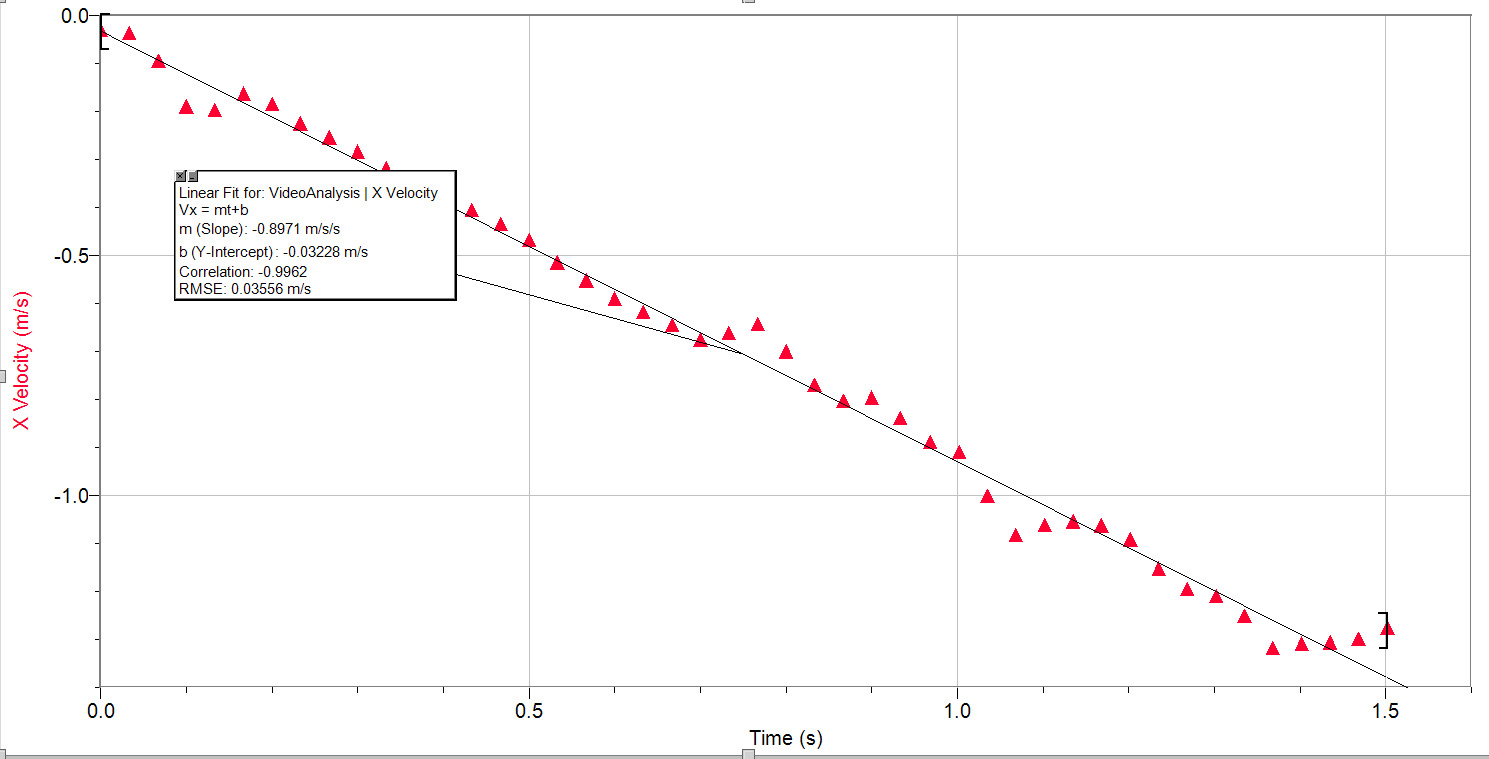
The y value in the Velocity time graph expresses the velocity and the x values express the elapsed time. The Slope of this graph shows the acceleration. The plotted points in the graph show how fast the object is moving at that interval of time. This overall graph shows the change in velocity over the course of time. The y intercept represents the initial velocity when time equals 0.
Determining acceleration and starting velocity from a Position Time Graph
The slope of the position time graph is the velocity. By taking the derivative of the position time graph, you arrive at the velocity time graph. The Velocity time graph then perfectly describes the needed data. The Starting velocity is then the y intercept of that graph and the slope of this graph.
Determining Position, Distance and Displacement from a Velocity Time Graph
When looking at the velocity time graph, you can determine the Distance traveled by finding the total area between the graph and the axis. This counts for both negative and positive velocities. For Displacement, you find the area underneath the positive velocity and the area underneath the negative velocity. Then you can subtract the negative area from the positive area. To determine the position you multiply velocity by elapsed time. This is true because V=d/t.
The y value in the Velocity time graph expresses the velocity and the x values express the elapsed time. The Slope of this graph shows the acceleration. The plotted points in the graph show how fast the object is moving at that interval of time. This overall graph shows the change in velocity over the course of time. The y intercept represents the initial velocity when time equals 0.
Determining acceleration and starting velocity from a Position Time Graph
The slope of the position time graph is the velocity. By taking the derivative of the position time graph, you arrive at the velocity time graph. The Velocity time graph then perfectly describes the needed data. The Starting velocity is then the y intercept of that graph and the slope of this graph.
Determining Position, Distance and Displacement from a Velocity Time Graph
When looking at the velocity time graph, you can determine the Distance traveled by finding the total area between the graph and the axis. This counts for both negative and positive velocities. For Displacement, you find the area underneath the positive velocity and the area underneath the negative velocity. Then you can subtract the negative area from the positive area. To determine the position you multiply velocity by elapsed time. This is true because V=d/t.
Connecting representations of motion: x-t graphs, v-t graphs, strobe diagrams etc.
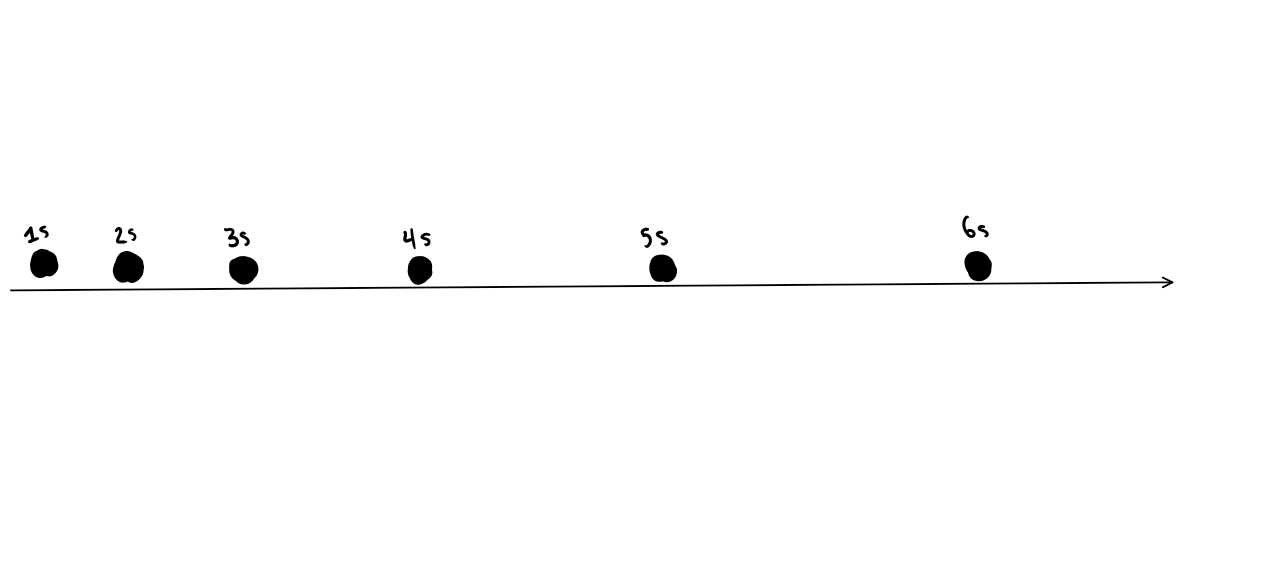
All three of a x-t graph, v-t graph, are interconnected. The x-t graphs and v-t graphs are connected because velocity is simply the derivative of the x-t graph. By taking the slope of the x-t graph and plotting it out vs. time, it becomes the v-t graph. A strobe diagram is also connected because it is an alternate form of a position time graph. It plots points in a straight line like they are moving across your vision in front of you. Instead of graphing the two variables on two different axes, time is expressed by the number of points showing up. A new point is placed every certain time interval has elapsed and the position is graphed on where the object is at that specific interval. By figuring out the change in distance between two points and dividing it by the time interval, you arrive at the velocity. Below, Figure 3 displays a strobe diagram. Figure 1 and 2 above display examples of a x-t graph and a v-t graph.
All three of a x-t graph, v-t graph, are interconnected. The x-t graphs and v-t graphs are connected because velocity is simply the derivative of the x-t graph. By taking the slope of the x-t graph and plotting it out vs. time, it becomes the v-t graph. A strobe diagram is also connected because it is an alternate form of a position time graph. It plots points in a straight line like they are moving across your vision in front of you. Instead of graphing the two variables on two different axes, time is expressed by the number of points showing up. A new point is placed every certain time interval has elapsed and the position is graphed on where the object is at that specific interval. By figuring out the change in distance between two points and dividing it by the time interval, you arrive at the velocity. Below, Figure 3 displays a strobe diagram. Figure 1 and 2 above display examples of a x-t graph and a v-t graph.
Solving Problems using constant velocity and uniform acceleration models.
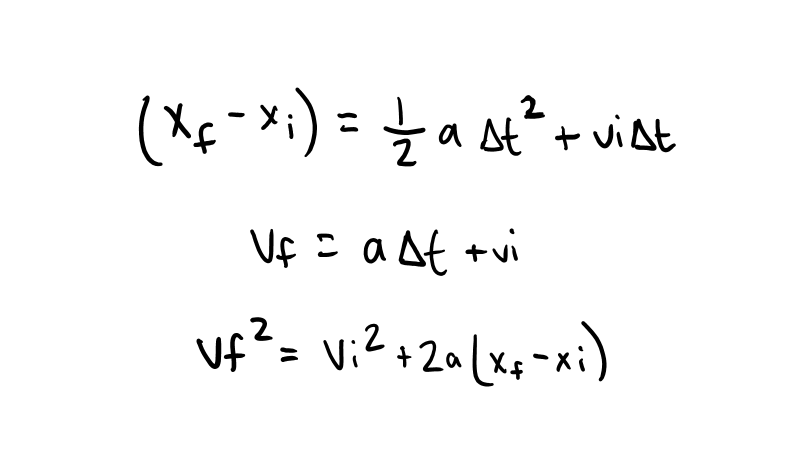
Listed above are the three Kinematic equations used for calculating variables relating to motion in this section. Our 6 variables listed are xi (initial position), xf (final position), vi (initial velocity), vf (final velocity), a (acceleration), and t (time). These three equations can be used interchangeably and used to find unknown variables.
Projectile Motion
A projectile is an object moving through the air that is not interacting with the air. There are two main parts of projectile motion: Vertical and Horizontal Movement. Vertical motion and the force put into it determines how high the projectile goes and how long it stays in the air. Vertical motion also is impacted by the acceleration by gravity. Gravity enacts an acceleration of 9.8 m/s^2 and is eventually what pulls the object back into the ground. The other aspect of projectile movement is horizontal motion. Horizontal motion is the force put into the projectile determining how far the projectile will travel. Unlike vertical motion, the horizontal velocity will not change and will stay the same for the entire flight of the projectile.
Listed above are the three Kinematic equations used for calculating variables relating to motion in this section. Our 6 variables listed are xi (initial position), xf (final position), vi (initial velocity), vf (final velocity), a (acceleration), and t (time). These three equations can be used interchangeably and used to find unknown variables.
Projectile Motion
A projectile is an object moving through the air that is not interacting with the air. There are two main parts of projectile motion: Vertical and Horizontal Movement. Vertical motion and the force put into it determines how high the projectile goes and how long it stays in the air. Vertical motion also is impacted by the acceleration by gravity. Gravity enacts an acceleration of 9.8 m/s^2 and is eventually what pulls the object back into the ground. The other aspect of projectile movement is horizontal motion. Horizontal motion is the force put into the projectile determining how far the projectile will travel. Unlike vertical motion, the horizontal velocity will not change and will stay the same for the entire flight of the projectile.
Unit 2: Forces
Unit 2, Forces, explores the different possible forces acting upon each other and how they interact. It examined all the forces of Gravity, Friction, Spring, Normal, Applied, Tension, and Air Resistance. This unit also included adding and subtracting the vectors of these forces and calculating the measure of the forces in Newtons. Finally, this unit connects the measurement of Forces to the kinematic equations for the motion of an object.
Newton’s First Law
Newton’s First Law of Motion is that an object in motion will continue to move at the same constant velocity unless it is acted upon by an unbalanced push or pull. This law is also commonly referred to as the law of Inertia. Inertia is determined by the mass of an object: the more mass an object has, the greater Inertia. Inertia describes how easily an object is able to be accelerated. The larger the Inertia, the greater the Force required to accelerate the object. This explains why a car is much harder to stop than a bike if they were moving at the same velocity.
Newton's Second Law
Newton’s Second Law of Motion helps describe the first law by creating an equation for the relationship between net force, acceleration, and mass. It says the acceleration is proportional to the Net Force and inversely proportional to the total mass of the system. It expresses this in the equation a= Net Force/m which can also be rewritten as F = ma. This equation and law is significant because it provides an important guideline to calculating the forces acting on a certain object, describing it’s motion.
Newton’s Third Law
Newton’s third law describes the relationship between two different objects when interacting. This law states that when two objects interact, both of them exert a force on each other. This relationship can be hard to see at times between objects of different masses. For example, take the earth and the moon. They both exert a force on each other of equal magnitude, however the force exerted on the moon has a much larger effect than the one on Earth. This is because the mass of the Earth is much greater, and going back to the Law of Inertia, is much harder to accelerate.
Identifying Interactions: System Schema and Force Diagrams
System Schema and Force Diagrams are visual aids to model the forces acting on a specific object and their respective magnitude and direction. The System Schema is less in depth and just provides a brief overview of the different Forces acting on an object. It connects the object to other objects positioned outside, indicating the type of force that is going on between them and whether or not it is a contact force or not. Below is an example of a System Schema of a block being pushed along a table.
Newton’s First Law
Newton’s First Law of Motion is that an object in motion will continue to move at the same constant velocity unless it is acted upon by an unbalanced push or pull. This law is also commonly referred to as the law of Inertia. Inertia is determined by the mass of an object: the more mass an object has, the greater Inertia. Inertia describes how easily an object is able to be accelerated. The larger the Inertia, the greater the Force required to accelerate the object. This explains why a car is much harder to stop than a bike if they were moving at the same velocity.
Newton's Second Law
Newton’s Second Law of Motion helps describe the first law by creating an equation for the relationship between net force, acceleration, and mass. It says the acceleration is proportional to the Net Force and inversely proportional to the total mass of the system. It expresses this in the equation a= Net Force/m which can also be rewritten as F = ma. This equation and law is significant because it provides an important guideline to calculating the forces acting on a certain object, describing it’s motion.
Newton’s Third Law
Newton’s third law describes the relationship between two different objects when interacting. This law states that when two objects interact, both of them exert a force on each other. This relationship can be hard to see at times between objects of different masses. For example, take the earth and the moon. They both exert a force on each other of equal magnitude, however the force exerted on the moon has a much larger effect than the one on Earth. This is because the mass of the Earth is much greater, and going back to the Law of Inertia, is much harder to accelerate.
Identifying Interactions: System Schema and Force Diagrams
System Schema and Force Diagrams are visual aids to model the forces acting on a specific object and their respective magnitude and direction. The System Schema is less in depth and just provides a brief overview of the different Forces acting on an object. It connects the object to other objects positioned outside, indicating the type of force that is going on between them and whether or not it is a contact force or not. Below is an example of a System Schema of a block being pushed along a table.
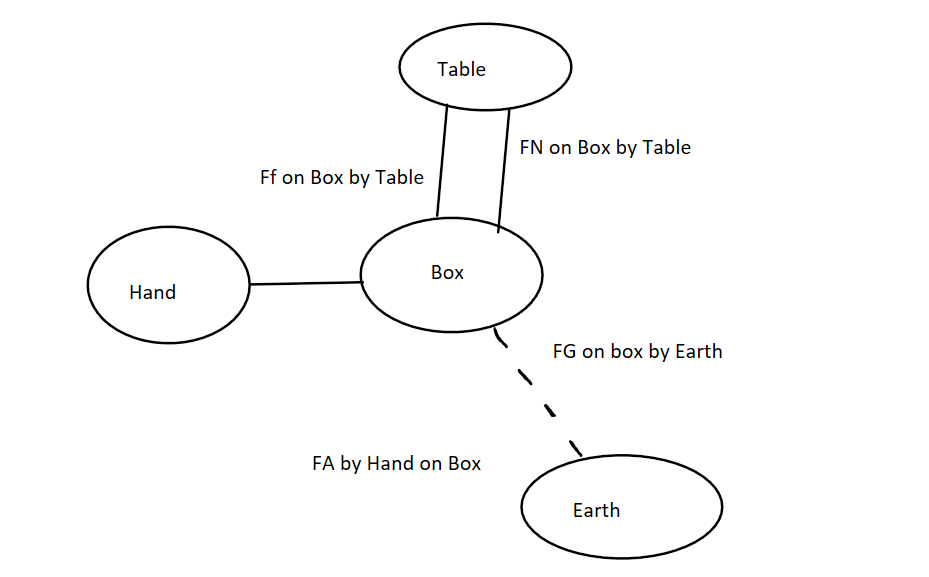
The block is pictured interacting with the Table with the Forces of Friction and Normal. It is interacting with the Earth by the Force of Gravity and is interacting with the hand pushing it by an Applied force. The Force Diagram is similar, but it displays these forces as vectors stemming from the object of interest. Below is an image of the force diagram for a block being pushed across a table.
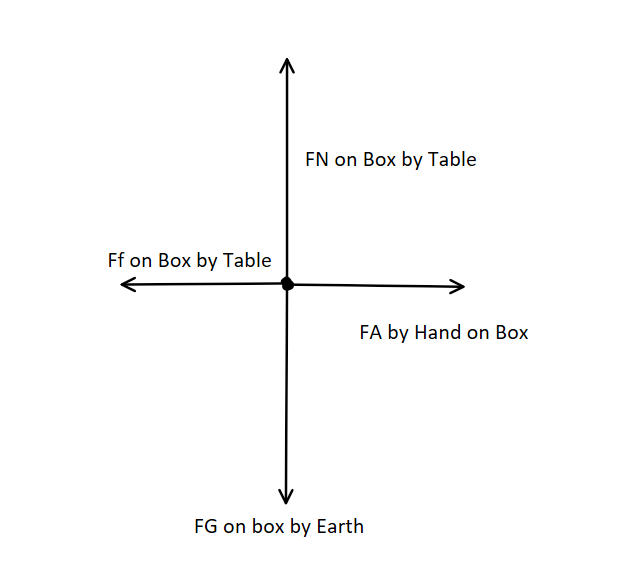
The Normal force is pointing upward because it is perpendicular to the surface the object is on. The Gravity force is pointing downward because that is the direction of the Earth. The Applied Force is pointing to the right because that is the direction of the force and the Friction Force is pointing in the opposite direction because it is counteracting the motion.
Force Calculations
To calculate a certain force or the total force of a function, it is easiest to multiply the total mass and acceleration together. This is how the Gravity calculation is done for example. The acceleration of gravity is 9.8 m/s^2 and the mass is easily measured. Simply multiplying these together gets you the Force of Gravity. This works the same for the total system as a whole, not just one force, however, the equation F = ma describes the Total Net Force and the Total mass. If that information isn’t available, you can still find the Net Force. By adding up the horizontal forces acting on the object and the vertical forces, the net force can be found. This works a little differently for forces like spring force and friction which have their own coefficient. Friction has the coefficient, mew, which is calculated by FN/Ff, and spring force is defined by Fs = -k(change in x).
Solving Force Problems
Solving Force problems first depends on lawing out the information given to you. The First steps however are almost always drawing out the system schema and then the force diagram. This allows you to figure out the different forces acting on the object and which are balanced. To calculate the forces, use the mass, acceleration, and their unbalanced/balanced relationship with the other forces. Once this has been achieved you can now place the values of the forces into the force table to calculate the net force. To find the values of forces while they are diagonal. To find the horizontal and vertical component to put into the force table, you must multiply by sin(theta)(hypotonuse) and cos(theta)(hypotonuse). Then the net force is ready to be added.
Relating Representations of Motion and Force Models
Force Models not only represent forces well, but they also help represent Motion. Motion is described by a multitude of variables, but mostly velocity, acceleration, and displacement. Force models do a good job at expressing the acceleration aspect of the motion. By depicting all of the acting forces and their directions and magnitudes, it shows what forces are balanced or unbalanced. If the total Force is unbalanced and not equal to zero, then the object will be accelerating.
Solving Problems with Forces and Motion
To solve a problem with Forces and Motion you must first collect all the information about forces that are available. Use it to create a force diagram and a system schema. Use the forces to try and work to ultimately use the equation F = ma. The acceleration is the bridge between forces and Kinematic equations of motion. Being able to solve for acceleration using the motion and Kinematic equations allow you to plug it back into F = ma to find the net force.
Force Calculations
To calculate a certain force or the total force of a function, it is easiest to multiply the total mass and acceleration together. This is how the Gravity calculation is done for example. The acceleration of gravity is 9.8 m/s^2 and the mass is easily measured. Simply multiplying these together gets you the Force of Gravity. This works the same for the total system as a whole, not just one force, however, the equation F = ma describes the Total Net Force and the Total mass. If that information isn’t available, you can still find the Net Force. By adding up the horizontal forces acting on the object and the vertical forces, the net force can be found. This works a little differently for forces like spring force and friction which have their own coefficient. Friction has the coefficient, mew, which is calculated by FN/Ff, and spring force is defined by Fs = -k(change in x).
Solving Force Problems
Solving Force problems first depends on lawing out the information given to you. The First steps however are almost always drawing out the system schema and then the force diagram. This allows you to figure out the different forces acting on the object and which are balanced. To calculate the forces, use the mass, acceleration, and their unbalanced/balanced relationship with the other forces. Once this has been achieved you can now place the values of the forces into the force table to calculate the net force. To find the values of forces while they are diagonal. To find the horizontal and vertical component to put into the force table, you must multiply by sin(theta)(hypotonuse) and cos(theta)(hypotonuse). Then the net force is ready to be added.
Relating Representations of Motion and Force Models
Force Models not only represent forces well, but they also help represent Motion. Motion is described by a multitude of variables, but mostly velocity, acceleration, and displacement. Force models do a good job at expressing the acceleration aspect of the motion. By depicting all of the acting forces and their directions and magnitudes, it shows what forces are balanced or unbalanced. If the total Force is unbalanced and not equal to zero, then the object will be accelerating.
Solving Problems with Forces and Motion
To solve a problem with Forces and Motion you must first collect all the information about forces that are available. Use it to create a force diagram and a system schema. Use the forces to try and work to ultimately use the equation F = ma. The acceleration is the bridge between forces and Kinematic equations of motion. Being able to solve for acceleration using the motion and Kinematic equations allow you to plug it back into F = ma to find the net force.
Unit 3: Centripetal Motion
Brief Overview
Centripetal motion is the description of an object’s movement around in a circle with a set radius. We first started this unit by describing circular motion in respect to angular displacement. From there it is possible to convert the angular velocity and eventually the centripetal velocity by using the radius. Another huge part of this unit was determining the object’s acceleration by deriving a new formula using the velocity of the object and radius of the circle. This allowed us to move interchangeably with the forces acting on the object. Lastly we used an equation for the universal force of Gravity to apply it to objects affected by the force of gravity in space.
Uniform circular motion
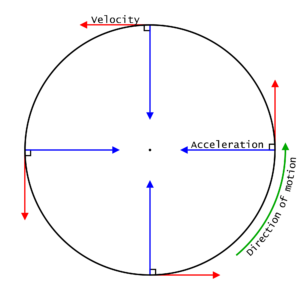
Uniform Circular motion is the revolution of an object around a set center. This center has a radius that does not change for the motion of the object. This object has a centripetal velocity that can be measured by the time to make the rotation. To find the speed of the object in motion, divide the distance by finding the circumference of the circle made, by the time of the rotation. From finding the centripetal velocity it is easy to derive the acceleration. There is always acceleration in centripetal motion. This is because velocity is a measure of direction and speed, so any change in direction of the object will result in an acceleration. From a lab measuring the speed of a rotating object and the forces pulling on the object, we were able to determine the equation a=(v^2)/r . This equation is significant because we can solve for any of those three values, but it also allows for the forces acting on the object to be solved for as well. (v^2)/r can be substituted for a in the equation F=ma. By using the mass of said object, the net force acting on the object is easy to find. Having to do with forces, if an object is in centripetal motion, there will always be a force pointing to the center of the circle created in rotation. This is the force that is ultimately kept in the object in orbit and on the radius.
Universal Gravitation
Universal gravitation is the expression for the force of Gravity. This equation is how the acceleration of gravity is found on Earth to be able to use. Universal gravitation takes into account the total radius, the mass of the two objects interacting, and the Gravitational constant 6.67 x 10^-11. The main point of Universal Gravitation is that it is inversely proportional to the square of the distance between the objects and proportional to the masses. This means that the farther the objects are from each other it will be that distance squared smaller. The equation for this expression is Fg= G (M1+M2)/(r^2). By plugging in the mass and radius of Earth is where the 9.8 m/s^2 comes from. This force of gravity is used by this equation and helps plug into the equation for determining the mass, acceleration, and net force of the object in orbit.
https://www.google.com/url?sa=i&url=https%3A%2F%2Fwww.quora.com%2FWhat-is-uniform-circular-motion&psig=AOvVaw0VHgnZYjUt7TrcsyCthT-Y&ust=1639795181385000&source=images&cd=vfe&ved=0CAsQjRxqFwoTCOD9-a_n6fQCFQAAAAAdAAAAABAD
Centripetal motion is the description of an object’s movement around in a circle with a set radius. We first started this unit by describing circular motion in respect to angular displacement. From there it is possible to convert the angular velocity and eventually the centripetal velocity by using the radius. Another huge part of this unit was determining the object’s acceleration by deriving a new formula using the velocity of the object and radius of the circle. This allowed us to move interchangeably with the forces acting on the object. Lastly we used an equation for the universal force of Gravity to apply it to objects affected by the force of gravity in space.
Uniform circular motion
Uniform Circular motion is the revolution of an object around a set center. This center has a radius that does not change for the motion of the object. This object has a centripetal velocity that can be measured by the time to make the rotation. To find the speed of the object in motion, divide the distance by finding the circumference of the circle made, by the time of the rotation. From finding the centripetal velocity it is easy to derive the acceleration. There is always acceleration in centripetal motion. This is because velocity is a measure of direction and speed, so any change in direction of the object will result in an acceleration. From a lab measuring the speed of a rotating object and the forces pulling on the object, we were able to determine the equation a=(v^2)/r . This equation is significant because we can solve for any of those three values, but it also allows for the forces acting on the object to be solved for as well. (v^2)/r can be substituted for a in the equation F=ma. By using the mass of said object, the net force acting on the object is easy to find. Having to do with forces, if an object is in centripetal motion, there will always be a force pointing to the center of the circle created in rotation. This is the force that is ultimately kept in the object in orbit and on the radius.
Universal Gravitation
Universal gravitation is the expression for the force of Gravity. This equation is how the acceleration of gravity is found on Earth to be able to use. Universal gravitation takes into account the total radius, the mass of the two objects interacting, and the Gravitational constant 6.67 x 10^-11. The main point of Universal Gravitation is that it is inversely proportional to the square of the distance between the objects and proportional to the masses. This means that the farther the objects are from each other it will be that distance squared smaller. The equation for this expression is Fg= G (M1+M2)/(r^2). By plugging in the mass and radius of Earth is where the 9.8 m/s^2 comes from. This force of gravity is used by this equation and helps plug into the equation for determining the mass, acceleration, and net force of the object in orbit.
https://www.google.com/url?sa=i&url=https%3A%2F%2Fwww.quora.com%2FWhat-is-uniform-circular-motion&psig=AOvVaw0VHgnZYjUt7TrcsyCthT-Y&ust=1639795181385000&source=images&cd=vfe&ved=0CAsQjRxqFwoTCOD9-a_n6fQCFQAAAAAdAAAAABAD
Unit 4: Energy
Energy
Energy is the thing needed for an object to do something. This unit further defines Energy as it begins to explain how energy cannot be created or destroyed, but is always stored. It explores all types of energy but mainly focuses on Kinetic, Gravitational, Elastic, and Thermal and the relationship between them. The unit then focuses on the energy calculations and finding the energy of a system based on position and motion. Lastly the unit discusses the topic of Power and the release of energy.
LOL Graphs
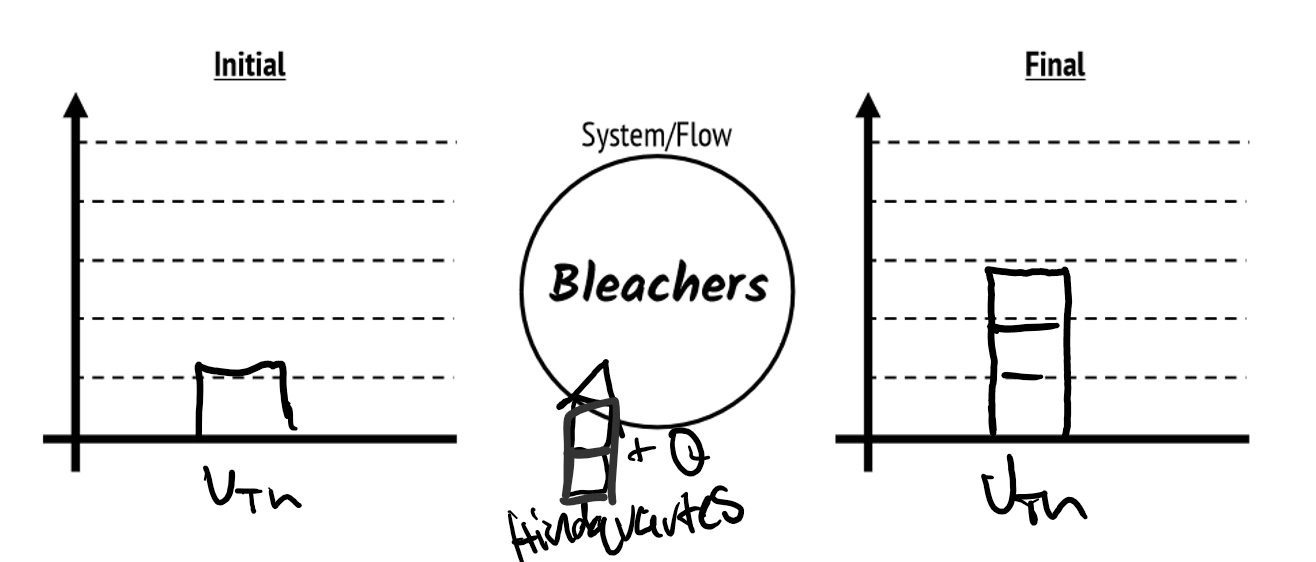
LOL graphs represent the change of types of types of energy in the system. The first graph represents The initial amount of energy in the system. A different bar for each type of energy and the height of each bar is determined by the amount of energy in Joules. The circle in the middle represents the system with all the parts of the system written inside. The arrow in and out of the system shows how the energy is transferred into the system and gained. The graph on the right shows the bars again but after the work has been done. Below is an example of a person warming the bleachers by sitting on them and the heating that occurs between.
Energy is the thing needed for an object to do something. This unit further defines Energy as it begins to explain how energy cannot be created or destroyed, but is always stored. It explores all types of energy but mainly focuses on Kinetic, Gravitational, Elastic, and Thermal and the relationship between them. The unit then focuses on the energy calculations and finding the energy of a system based on position and motion. Lastly the unit discusses the topic of Power and the release of energy.
LOL Graphs
LOL graphs represent the change of types of types of energy in the system. The first graph represents The initial amount of energy in the system. A different bar for each type of energy and the height of each bar is determined by the amount of energy in Joules. The circle in the middle represents the system with all the parts of the system written inside. The arrow in and out of the system shows how the energy is transferred into the system and gained. The graph on the right shows the bars again but after the work has been done. Below is an example of a person warming the bleachers by sitting on them and the heating that occurs between.
Energy Problem Solving
Energy problem solving is done by equations provided for the different types of energy. The equations for Gravitational Potential, Kinetic, and Elastic Potential Energy are
Ug= mgh
K= ½ x m x v^2
Eel= ½ x k x (displacement)^2
Because energy cannot be created or lost, it is easy to solve for other energies in a transfer, because the energy value must stay constant for them all.
Work
Work is an expression of the transfer of energy through an external force acting on the system. Work is one of the three ways energy is transferred along with Heating and Radiating, but only Work represents a force acting on the system. The value of the work done can change based on how large the force is acting on the system and the distance caused by the force. For example, there would be much more work done when pulling a sled a kilometer than pulling it only 10 meters. This equation is derived to be W=FxDisplacent. There is both positive work and negative work. Positive work is when the work causes the system to gain energy and negative work causes the system to lose. Work is especially important in creating energy equations because it shows how the energy was transferred in the system and makes the equation equal.
Power
Power is an expression of how quickly a system can release energy. The quicker a system can release a lot of energy, the more powerful it is. More formally, it is the rate of transfer of energy. The equation to represent power is P= W/(change in time). Work is the change in energy, so it represents the energy released and it is divided by the time taken to release energy to create the rate of change.
Relating Energy/Work/Power to Forces and Motion
Forces and motion are incredibly important in determining the Energy and Work of the system. The first and most obvious relation between the two groups is that an external force acting on a system is represented by work in terms of energy. Also, determining the Kinetic energy of an object completely depends on the motion and more specifically the velocity. The faster that the object is moving, the more kinetic energy it will have. Similarly when determining the Gravitational Potential energy, the gravitational constant of acceleration (which is a form of motion and force) is a key part in finding the energy. Elastic potential energy is changed by the displacement of the spring and when released causes motion and a spring force. Almost all forms of energy are a force or in motion, or have the potential to be so in the future.
Connecting Representations of Motion with Representations of Forces with Representations of Energy
All three of motion, force, and energy are intertwined because they cause each other to change. The form of graphs is a little different but they are all expressed over time. Motion graphs are often depicted in a position time graph where it shows where the object has moved over a period of time. Force graphs are expressed mostly as system schemas and force models to visualize and model the direction and magnitude of forces. Energy graphs simply focus more on the change in energy over a period
Energy problem solving is done by equations provided for the different types of energy. The equations for Gravitational Potential, Kinetic, and Elastic Potential Energy are
Ug= mgh
K= ½ x m x v^2
Eel= ½ x k x (displacement)^2
Because energy cannot be created or lost, it is easy to solve for other energies in a transfer, because the energy value must stay constant for them all.
Work
Work is an expression of the transfer of energy through an external force acting on the system. Work is one of the three ways energy is transferred along with Heating and Radiating, but only Work represents a force acting on the system. The value of the work done can change based on how large the force is acting on the system and the distance caused by the force. For example, there would be much more work done when pulling a sled a kilometer than pulling it only 10 meters. This equation is derived to be W=FxDisplacent. There is both positive work and negative work. Positive work is when the work causes the system to gain energy and negative work causes the system to lose. Work is especially important in creating energy equations because it shows how the energy was transferred in the system and makes the equation equal.
Power
Power is an expression of how quickly a system can release energy. The quicker a system can release a lot of energy, the more powerful it is. More formally, it is the rate of transfer of energy. The equation to represent power is P= W/(change in time). Work is the change in energy, so it represents the energy released and it is divided by the time taken to release energy to create the rate of change.
Relating Energy/Work/Power to Forces and Motion
Forces and motion are incredibly important in determining the Energy and Work of the system. The first and most obvious relation between the two groups is that an external force acting on a system is represented by work in terms of energy. Also, determining the Kinetic energy of an object completely depends on the motion and more specifically the velocity. The faster that the object is moving, the more kinetic energy it will have. Similarly when determining the Gravitational Potential energy, the gravitational constant of acceleration (which is a form of motion and force) is a key part in finding the energy. Elastic potential energy is changed by the displacement of the spring and when released causes motion and a spring force. Almost all forms of energy are a force or in motion, or have the potential to be so in the future.
Connecting Representations of Motion with Representations of Forces with Representations of Energy
All three of motion, force, and energy are intertwined because they cause each other to change. The form of graphs is a little different but they are all expressed over time. Motion graphs are often depicted in a position time graph where it shows where the object has moved over a period of time. Force graphs are expressed mostly as system schemas and force models to visualize and model the direction and magnitude of forces. Energy graphs simply focus more on the change in energy over a period
Unit 5: Momentum
Types of Collisions
Collisions have a total of four different types of collisions. The different collisions are an Elastic Collision, Inelastic Collision, Perfectly Inelastic Collision, and Explosions. First is Elastic equations, where there is no deformity in the colliding objects. Also, in elastics collisions, there is no change in the Kinetic energy in the system containing the two objects. AN example of this would be two billiard balls colliding. Second is Inelastic collisions. In this type of collision, there is some sort of deformity in either one or both objects. This will result in the loss of Kinetic energy in the system. An example of this would be two cars colliding. Third is Perfectly inelastic collisions. Perfectly inelastic collisions include any collision in which the two objects join together and become one singular object. In this type of collision kinetic energy is lost and there is deformation of one or all objects. An example of this would be a bullet being shot and becoming stuck in a wooden block. Finally there is the Explosion. An explosion is defined by when a singular object is split up into multiple different objects. Kinetic energy is gained during an explosion and the center of mass has a momentum that remains unchanged.
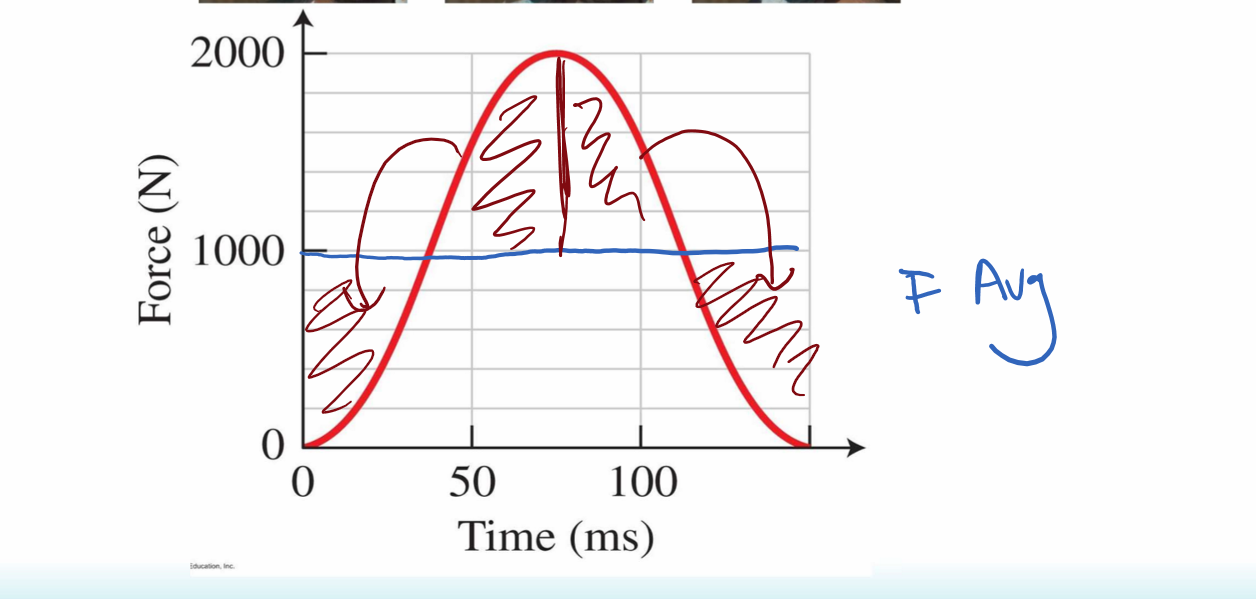
Impulse
Impulse is a kind of measurement that measures how much momentum is gained or lost in a system during the work of an outside force. It is in essence, the change of momentum in a certain amount of time. It is expressed by an equation that takes into account the force acting on the system and time it spends acting on it. The equation is Net Force x Change in TIme = J (J is the variable representing Impulse). Impulse is visually represented in graphs, with the y axis being the Force and the X axis being the elapsed time. The impulse in this graph is measured in the area underneath the slope. A visual of this impulse graph is pictured below.
Collisions have a total of four different types of collisions. The different collisions are an Elastic Collision, Inelastic Collision, Perfectly Inelastic Collision, and Explosions. First is Elastic equations, where there is no deformity in the colliding objects. Also, in elastics collisions, there is no change in the Kinetic energy in the system containing the two objects. AN example of this would be two billiard balls colliding. Second is Inelastic collisions. In this type of collision, there is some sort of deformity in either one or both objects. This will result in the loss of Kinetic energy in the system. An example of this would be two cars colliding. Third is Perfectly inelastic collisions. Perfectly inelastic collisions include any collision in which the two objects join together and become one singular object. In this type of collision kinetic energy is lost and there is deformation of one or all objects. An example of this would be a bullet being shot and becoming stuck in a wooden block. Finally there is the Explosion. An explosion is defined by when a singular object is split up into multiple different objects. Kinetic energy is gained during an explosion and the center of mass has a momentum that remains unchanged.
Impulse
Impulse is a kind of measurement that measures how much momentum is gained or lost in a system during the work of an outside force. It is in essence, the change of momentum in a certain amount of time. It is expressed by an equation that takes into account the force acting on the system and time it spends acting on it. The equation is Net Force x Change in TIme = J (J is the variable representing Impulse). Impulse is visually represented in graphs, with the y axis being the Force and the X axis being the elapsed time. The impulse in this graph is measured in the area underneath the slope. A visual of this impulse graph is pictured below.
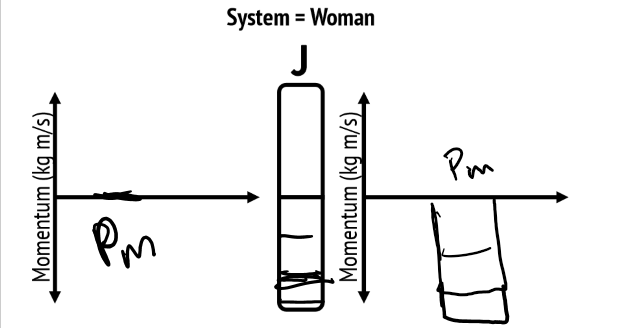
Momentum
Momentum is essentially the expression of how hard it is to stop an object. It is also somewhat related to the inertia an object has. Momentum is represented by the variable p and is expressed by the equation p=mv. An object that is not moving has no momentum and the faster an object is moving, the more momentum it will have. Momentum is able to be visualized in a bar chart. A momentum bar chart is pictured below. The left side shows the momentum of the system before the force and after the bar indicating the impulse, the right side shows the momentum after the force.
Momentum is essentially the expression of how hard it is to stop an object. It is also somewhat related to the inertia an object has. Momentum is represented by the variable p and is expressed by the equation p=mv. An object that is not moving has no momentum and the faster an object is moving, the more momentum it will have. Momentum is able to be visualized in a bar chart. A momentum bar chart is pictured below. The left side shows the momentum of the system before the force and after the bar indicating the impulse, the right side shows the momentum after the force.
Conservation of Momentum
Momentum is a conserved quantity. This means that the initial momentum added with the impulse will equal the final momentum of the object. Also, objects have a center of mass. The center of mass is the part of the object that always maintains the same momentum.
Relating Momentum, Energy, Forces, and Kinematics
Momentum is completely made up of Energy, Forces and Kinematics. Momentum itself as a quantity relies on the velocity and the mass coming from kinematics in order to calculate. The change in momentum, or impulse, takes elements from forces as it uses the net force over a given interval of time to calculate the change in momentum. Lastly, the momentum deals with energy because it examines how Kinetic energy is saved or lost during a collision between two objects.
Momentum is a conserved quantity. This means that the initial momentum added with the impulse will equal the final momentum of the object. Also, objects have a center of mass. The center of mass is the part of the object that always maintains the same momentum.
Relating Momentum, Energy, Forces, and Kinematics
Momentum is completely made up of Energy, Forces and Kinematics. Momentum itself as a quantity relies on the velocity and the mass coming from kinematics in order to calculate. The change in momentum, or impulse, takes elements from forces as it uses the net force over a given interval of time to calculate the change in momentum. Lastly, the momentum deals with energy because it examines how Kinetic energy is saved or lost during a collision between two objects.
